
Autor: Rubén San Martín – Centro de Ingeniería Eléctrica y Sistemas (CESICE).FIIIDT.
Los semáforos son señales de tránsito que regulan el paso de los agentes que intervienen en la circulación, bien sean peatones, autos, ciclistas, entre otros, estos funcionan mediante señales luminosas que indican quién tiene el paso o quien debe detenerse, en el caso de los peatones les indica cuando pueden cruzar la calle o en el caso de un conductor cuando debe esperar porque es turno de los peatones o cuando circular.
Existen diferentes tipos de semáforo según a quién estén indicando el paso, si es a los peatones, de los coches o de los ciclistas. [1]
Semáforo para peatones: cuentan con dos colores y dos figuras, silueta de un peatón caminando con el color verde indicando que el peatón tiene el paso para cruzar la calle y la silueta de una mano de color rojo indicando que el peatón debe detenerse y esperar.
Semáforos para vehículos: estos cuentan con tres colores, verde normalmente con la silueta de una flecha que indica el paso de los vehículos y la dirección a la que pueden dirigirse. Amarillo, es una etapa de transición entre verde y rojo, indica a los conductores que deben reducir la velocidad y que pronto deben detenerse. Luz roja indica que los vehículos deben detenerse por completo y esperar para poder circular.
Hoy en día gracias a los grandes avances tecnológicos han agregado múltiples funciones a los semáforos, como los contadores regresivos para visualizar el tiempo de espera bien sea para vehículos o peatones, esto fue creado por Esteban Gastaldi (creativo publicitario argentino) obteniendo el título de patente de invención, otorgado por el Estado de la Nación Argentina a través del Instituto Nacional de la Propiedad Industrial (INPI) en marzo de 2001. [2]
Esto nos lleva a realizar diferentes sistemas de control automatizados para semáforos, un ejemplo de ello es el presentado a continuación.
En la Figura 1 se muestra la interacción de una autopista principal con un camino de acceso secundario. Se colocan sensores de detección de vehículos a lo largo de los carriles C y D (camino principal) y en los carriles A y B (camino de acceso). Las lecturas del sensor son bajas (0 lógico), cuando no pasa ningún vehículo, y alta (1 lógico) cuando pasa algún vehículo.
El semáforo del crucero se controlará de acuerdo con la siguiente lógica:
- El semáforo E-W estará en luz verde siempre que los carriles C y D estén ocupados.
- El semáforo E-W estará en luz verde siempre que los carriles C o D estén ocupados pero A y B no lo estén.
- El semáforo N-S estará en luz verde siempre que los carriles A y B estén ocupados pero C y D no lo estén.
- El semáforo N-S estará en luz verde cuando A y B estén ocupados en tanto que C y D estén vacantes. El semáforo E-W estará en luz verde cuando no haya vehículos transitando.
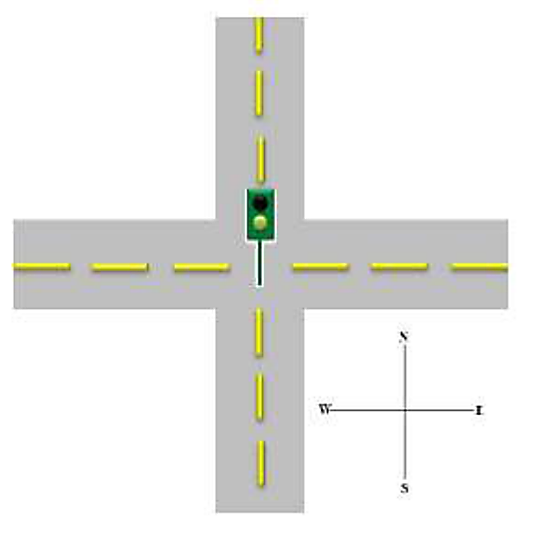
Además de las condiciones dadas, hay que tomar en cuenta que ambos semáforos no pueden estar en verde o en rojo simultáneamente, esto para evitar accidentes en la circulación de los vehículos.
Definiendo las señales de entrada que son los sensores de los carriles A, B, C y D, estos estarán en estado alto (1 lógico) cuando hay presencia de vehículos y en bajo (0 lógico) cuando no hay vehículos.
Para las salidas se tienen las luces de los semáforos E-W y N-S cada uno representado con led’s, verde y rojo, en total son cuatro salidas:

Encendidas con 1 lógico y apagadas con 0 lógico. Una vez definido el estado de activación de los sensores y de los actuadores se puede realizar la tabla de la verdad por la cual se regirá el sistema de control para los semáforos.
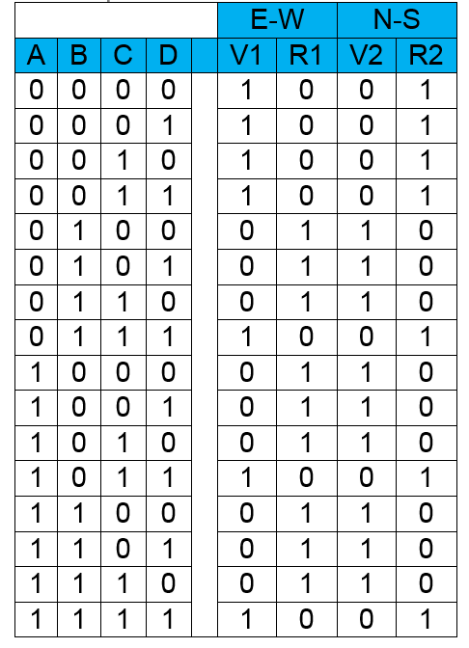
Debido a que son cuatro salidas de control se obtendrán cuatro funciones, una para cada actuador, pero observando la tabla podemos deducir que las luces V1 y R2 se activan al mismo tiempo, por lo tanto, V1 = R2 por otro lado las luces V2 y R1 también se activaran simultáneamente, entonces V2 = R1. Por último, notamos que V2 es la misma función que V1, pero negándola y R2 es la misma función que R1 negándola, con este análisis podemos reducir las funciones a una sola y decir que:

Nota: el apóstrofe indica que la función es negada. Se lee FV2 negada.
Para simplificar mucho más las funciones se hará uso de Mapas de Karnaugh [4].
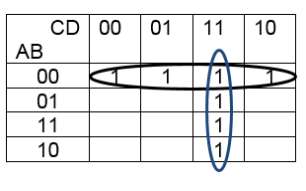
Del primer grupo horizontal sólo quedan las variables A y B negadas. Del grupo vertical las variables C y D. Por lo que se determina la función como:
![]()
Como se mencionó anteriormente se obtiene la función para las luces V2 y R1 negando la función FV1, entonces:

Una vez definidas las funciones booleanas que determinarán el control de los semáforos se puede realizar el esquemático para el circuito de los semáforos, tomando en cuenta que las sumas se hacen con compuertas OR, la multiplicación con AND y la negación con NOT, se usaran estados lógicos para los sensores de entradas y led’s para representar las salidas.
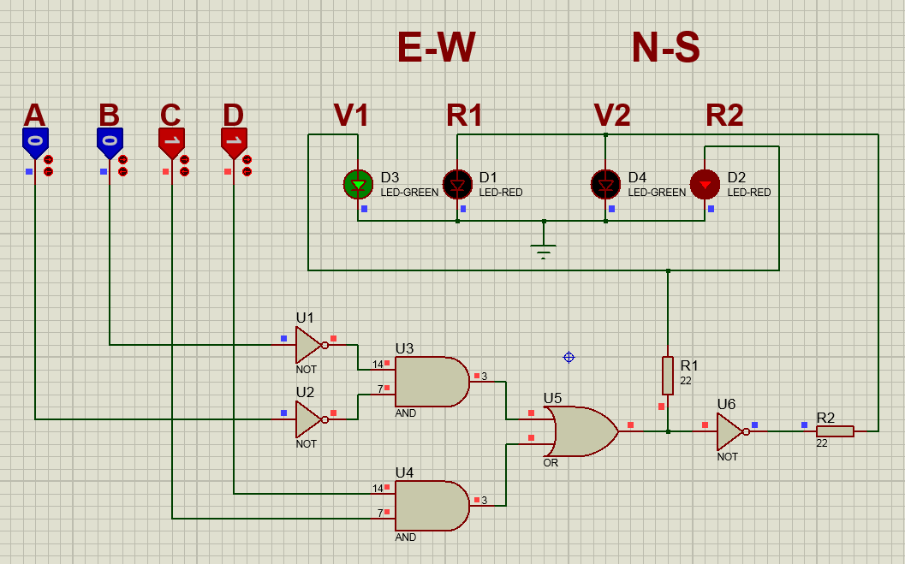
De esta manera se pueden realizar controles para semáforos con prioridades, otro ejemplo sería agregar un botón que pueda pulsar algún peatón para poder cruzar la calle, todo este tipo de lógicas se pueden controlar o automatizar mediante compuertas lógicas usando la electrónica digital.
Bibliografía:
[1] Fundación MAPFRE (2020). Para qué sirve el semáforo. Fecha de consulta: 22, septiembre, 2020 desde https://www.fundacionmapfre.org/fundacion/es_es/educa-tu-mundo/educacion-vial-prevencion-lesiones-no-intencionadas/sabias-que/para-que-sirve-semaforo.jsp
[2] Wikipedia (2020). Semáforo con cuenta regresiva. Fecha de consulta: 25, septiembre, 2020 desde https://es.wikipedia.org/wiki/Sem%C3%A1foro_con_cuenta_regresiva
[3] Rubén San Martín, José Barrios (2017). Compuertas Lógicas -Venezuela (Investigación para el Laboratorio de Sistemas Lógicos) Charallave: Universidad Nacional Experimental Politécnica “Antonio José de Sucre”, Ingeniería Mecatrónica.
[4] Bookdown (2019). Mapa de Karnaugh. Fecha de consulta: 17, septiembre, 2020 desde https://bookdown.org/alberto_brunete/intro_automatica/mapa-de-karnaugh.html
Contacto: rubensanmartin95@gmail.com