
Autores: Tomas Ramos1, Miguel Arellano1, Hermes Rondón1, Oscar Flores2 y Edixon Rojas3. 1Centro de Ingeniería Eléctrica y Sistemas (CIES). 2Centro de Tecnología en Materiales (CTM). 3Centro de Seguridad Informática y Certificación Electrónica (CSICE). FIIIDT.
Desde sus inicios como instituto de investigación y desarrollo la Fundación Instituto de Ingeniería siendo el brazo tecnológico a nivel nacional en sus distintas áreas de servicios como electricidad y electrónica, mecánica, tecnología en materiales y procesamiento digital de imágenes, el conocimiento de las distintas tecnologías en estas áreas de servicios es un valor agregado en los distintos desarrollos de proyectos que la Fundación Instituto de Ingeniería ha desarrollado desde sus comienzos.
La empresa TOSHIBA amplia todas sus líneas de desarrollo y servicios cubriendo desde el sector industrial hasta el sector de la salud. Específicamente en el área de la medicina preventiva del sector de la hemodinámica, esta empresa presenta una gama de equipos de tecnología de punta de alto nivel. Dentro de esta cartera de equipos, la empresa TOSHIBA tiene tomógrafos de arco en C de 3 y 6 ejes respectivamente modelo CAS850 con el fin de ser utilizados para es diferentes procesos médicos en el área de la hemodinámica. Los estudios de la dinámica de la sangre llamado hemodinámica en el interior de las estructuras sanguíneas como arterias, venas, arterias, así como la mecánica del corazón, se realizan utilizando catéteres finos que se introducen a las arterias desde la ingle o del brazo. Los estudios incluyen: cateterismo, aortografía, coronariografía, angioplastia con balón, colocación de stent, u otros procedimientos en donde estos equipos son imprescindibles a la hora de realizarlos. Estos equipos poseen 3 áreas operativas, las cuales mencionaremos a continuación:
- Una sala de operación en donde se encuentran la mesa de operación o cateterismo, el brazo robótico de 3 o 6 ejes y los monitores donde el médico cirujano controla los movimientos tanto de la mesa como del brazo y visualiza el recorrido del catéter a través de la vena y arteria. El brazo robótico elemento importante a la hora de realizar el procedimiento quirúrgico antes mencionado, está conformado por 6 grados de libertad en todo su recorrido monitoreando el camino del catéter desde la ingle hasta el corazón o en su defecto la masa craneal del paciente:
- El recorrido craneal-caudal en donde hace movimientos inclinados sobre el eje vertical totalmente fijo. Esto permite que las imágenes obtenidas sean lo más precisas en función del ángulo de incidencia.
- El rotacional que como su nombre lo indica gira el eje vertical de la base principal del equipo. Con este desplazamiento permite recorrer todo el ángulo de incidencia horizontal del paciente obteniendo imágenes más nítidas en todo el proceso quirúrgico.
- El recorrido de enfoque o cercanía-lejanía (near-away) en donde el receptor de imágenes se acerca o se aleja del paciente realizando un enfoque más nítido de la imagen obtenida.
- El rotacional sobre su mismo eje entre el emisor y receptor de fluorescencia (BLA) para la emisión de RX dando como resultado la imagen obtenida en los monitores.
- El movimiento de la base de la columna del brazo robótico permitiendo un recorrido rotacional de la misma manteniendo su eje vertical.
- Y finalmente movimiento de la base del piso arrastrando todo el brazo robótico en un recorrido rotacional horizontal por más de 180 grados.

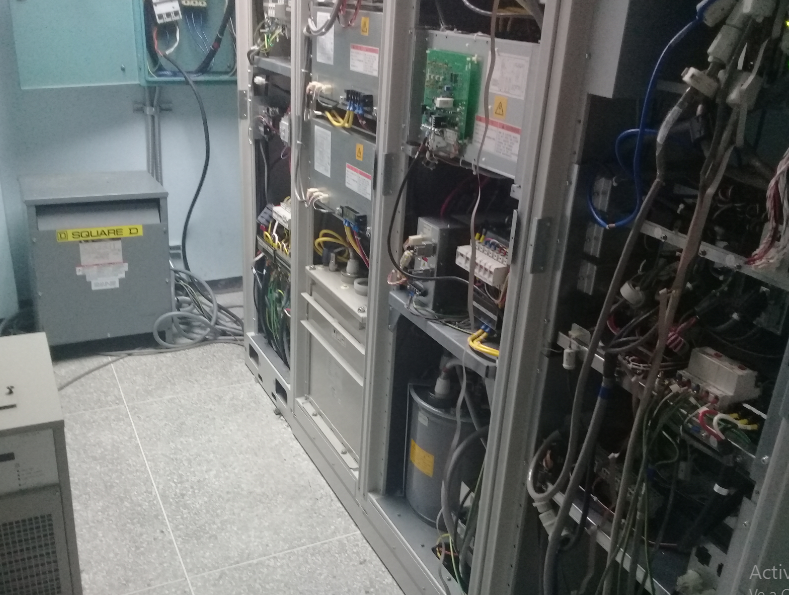
Una sala de control y potencia conformada por cuatro (4) gabinetes y que dependiendo de su aplicación y funcionalidad se dividen en:
- Gabinete de transferencia eléctrica: conformado por un transformador reductor de 480 Voltios a 220 Voltios en corriente alterna, un grupo de interruptores termo magnéticos que distribuyen la tensión al resto de los gabinetes, un contactor que dependiendo de una tensión de disparo del equipo para procesar la imágenes obtenidas enclava eléctricamente el dispositivo antes mencionado para inyectar la tensión al transformador reductor y finalmente un interruptor termo magnético que envía la tensión de entrada al contactor para su enclavamiento.
- Gabinetes de potencia en donde se recibe la tensión de 400 Voltios en corriente alterna para ser utilizado de dos formas. La primera es rectificando esa tensión alterna en su componente de corriente continua, con el fin de pasar por un conversor de corriente continua en impulsos de alta frecuencia y estos emitidos por el emisor de RX mientras que la otra forma de alimentación es inyectando esa tensión de entrada a un transformador cuyas salidas van a un acumulador de energía y se descarga a medida que se emiten los impulsos de alta frecuencia antes mencionado. Adicionalmente a toda esta infraestructura eléctrica, para generar tanto la tensión del acumulador como los impulsos de alta frecuencia para la emisión de RX este gabinete posee un RACK de tarjetas electrónicas con un sistema de desarrollo FPGA que controlan el proceso antes mencionado.
- Gabinetes de control en donde se reciben y se envían las señales que supervisan y monitorean el comportamiento dinámico y funcional de la mesa de operación y del brazo robótico (referencia bibliográfica 1). Para el caso de los equipos necesarios para realizar los seis (6) grados de libertad de la estructura robótica, en el gabinete se incorpora tres (3) dispositivos para manejar los servomotores de alta potencia, tal es el caso del movimiento craneal-caudal, rotacional y enfoque (cercanía y lejanía) y tres (3) variadores de frecuencia de mediana potencia para el control de movimiento de la columna, de la base o soporte al piso y de la rotación tanto del emisor como receptor de RX. Para llevar el control de posición de cada uno de los dispositivos móviles, en este gabinete si instala un sistema de desarrollo SPARTAC con tarjetas electrónicas de distinta funcionalidad para su aplicación:
- Una tarjeta o circuito electrónico en donde se incorpora el procesador que se encarga de supervisar y controlar los periféricos para tomar las decisiones adecuadas que realicen el movimiento de cada dispositivo móvil que interviene en este proceso quirúrgico.
- Una tarjeta o circuito electrónico en donde se reciban las señales del control de mando portátil (jostick) que controla los 6 grados de libertad adaptado a la mesa de operación. También en esa tarjeta de control se reciben las señales de posición generadas por los conmutadores de fin de carrera y los pulsadores incorporados en la parte posterior de la columna del brazo para el caso del tomógrafo de arco en C de 6 ejes, ya que controlan los movimientos de la columna y de la base del piso desde ese lugar o desde el control de mando portátil (jostick).
- Una tarjeta que controla el ángulo de emisión de la señal de RX. Ese dispositivo de ventana en donde se realiza el control antes mencionado es llamado Colimador y este circuito impreso controla el ángulo de emisión a través del control de mando portátil o de un teclado portátil conectado a este circuito impreso.
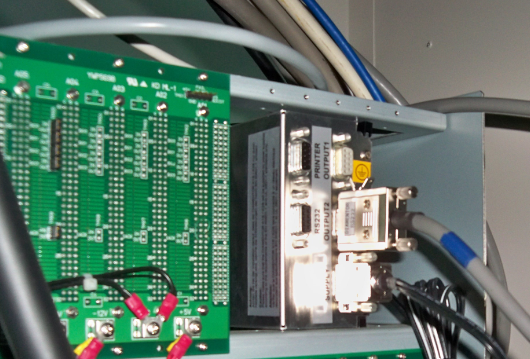
Es importante acotar que dentro de este gabinete de control también se incorpora un BACK-PLANE en donde se interconectan cada circuito electrónico entre si sumado a unos conectores incorporados a esta tarjeta de interconexión necesarios para recibir señales o de la mesa de operación o de la estructura robótica para llevar el control de todo el proceso operativo del tomógrafo de arco en C TOSHIBA CAS850 sea de tres (3) o seis (6) ejes. También a este gabinete de control se incorpora el dispositivo que recibe la señal del emisor de RX o DIAMENTOR para conectarse vía serial (RS-232) con la PC por el puerto serial COM1, incorporado en el gabinete auxiliar para retro proyectar las imágenes del proceso quirúrgico.
Adicionalmente a todos los gabinetes incorporados a la sala de control y potencia, existen otros dos (2) dispositivos que forman parte del control operativo del tomógrafo de arco en C TOSHIBA CAS850:
- Un gabinete encargado de recibir las señales analógicas del emisor de RX (DIAMENTOR) vía serial para procesarla en un RACK de tarjetas electrónicas y seguidamente reflejarlas en los monitores tanto en la sala de operación como en la sala de supervisión y control remota (referencia . Este gabinete es llamado ANGIOMETRO y su función es recibir las imágenes del emisor y del receptor de RX para hacerle una correlación morfológica de imágenes y reflejarlas en unos monitores Este gabinete está conformado por:
- Una computadora o PC en donde se incorporan un disco duro de arranque con el software infinix8000i, una tarjeta identificada como PUENTE DE IMÁGENES la cual envía en forma serial la data de la imagen que se recibe por el puerto serial COM1 del DIAMENTOR o dispositivo de emisión de RX al RACK procesadora de la imagen [4].
- Un RACK de tarjetas electrónicas necesarias para procesar las imágenes tanto del emisor como receptor de RX. Para el caso del receptor de las imágenes del RX, la señal que viene en un terminal de fibra llega a un dispositivo identificado como PROCESADOR DE COMANDO y enviada en forma digital en 16 bits al RACK procesadora de imágenes. En este dispositivo se realiza una correlación de ambas imágenes y el resultado es transmitido nuevamente a la computadora a través de la tarjeta PUENTE DE IMÁGENES, y esta la envía al circuito electrónico encargado de reflejar en los monitores la imagen procesada [2].

- Un chiller o enfriador que está conectado vía serial por el puerto COM2 del gabinete de control para procesar las imágenes (ANGIOMETRO), y que se necesita para circular el material refrigerante que necesita el cañón del colimador a la hora de emitir la señal al receptor.
. Como tercera y última área esta la zona de supervisión y control en donde se incorporan dispositivos de adquisición de imágenes como monitores conectados en paralelo a la sala de operaciones, un circuito cerrado de audio y los dispositivos de conexión remota llamado XBOX que se interconecta con el ANGIOMETRO para controlar el procesamiento de la imagen adquirida y la señal de disparo de la florescencia a la hora de realizar el proceso quirúrgico. Ahora esta señal se obtiene tanto en la sala de control y supervisión a través del XBOX o en la sala de operación en un conmutador de pie localizado en la parte inferior de la mesa de operación [3].
Todo este conocimiento adquirido en relación a la línea de equipos TOSHIBA en el área de hemodinámica modelo CAS850 nace de un servicio realizado a mediados de mayo del 2019 en el Centro Docente Cardiológico del Estado Aragua donde un grupo de profesionales de la Fundación Instituto de Ingeniería por solicitud del centro de salud antes mencionado realizaron un levantamiento de información y puesta a punto parcial de los tomógrafos de arco en C TOSHIBA modelo CAS850 de tres (3) y seis ejes respectivamente.
Desde ese momento se realizaron un conjunto de actividades que se mencionan a continuación:
- Levantamiento de información del material faltante e instalado en el área de hemodinámica del Centro Docente Cardiológico del Estado Aragua.
- Reestructuración de la infraestructura eléctrica de los gabinetes de control y potencia del tomógrafo de arco en C de 6 ejes.
- Revisión de los dispositivos de control para el movimiento de la estructura robótica para ambos tomógrafos.
- Energizar los gabinetes de control y potencia del tomógrafo de arco en C de 6 ejes y evaluar el comportamiento eléctrico de la mesa de cateterismo y el brazo robótico.
- Energizar solo el gabinete de control del tomógrafo de arco en C de 3 ejes y evaluar el comportamiento eléctrico de la mesa de cateterismo y el brazo robótico.
- Incorporar a la mesa de operación los equipos para el control de comandos de movimiento (jostick) para su puesta en funcionamiento.
- Revisión de la estructura mecánica del brazo robótico de ambos modelos.
CONCLUSIONES
Para inicios del 2020, después de un trabajo minucioso para la puesta a punto parcial de los tomógrafos de arco en C TOSHIBA CAS850 instalados en el área de hemodinámica del Centro Docente Cardiológico del Estado Aragua se determina que los alcances obtenidos en este servicio fueron:
- Alto nivel de aprendizaje y conocimiento en relación a los equipos TOSHIBA para el área de hemodinámica.
- El tomógrafo de arco en C de 6 ejes está en un 90% operativo en relación a la infraestructura eléctrica instalada y funcional. Faltaría incorporar los equipos y monitores de la sala de supervisión y control.
- El tomógrafo de arco en C de 3 ejes está en un 50% operativo en relación a la infraestructura eléctrica instalada y funcional. Faltaría incorporar los equipos y monitores de la sala de supervisión y control y el cableado faltante tanto en la sala de operaciones como en la sala de control y potencia donde están los gabinetes.
- El material faltante para la puesta a punto del sistema de adquisición de imágenes como el software infinix8000i, se está buscando a nivel nacional los equipos existentes en los centros de salud para obtener un respaldo de este software e instalarlo en estas instalaciones del Estado Aragua. En relación a este tema se ha conformado un grupo de trabajo liderado por el Ministerio del Poder Popular para la Ciencia y Tecnología (Mincyt) a través de sus entes adscritos CENDITEL, SUSCERTE y la FUNDACION INSTITUTO DE INGENIERIA (FIIIDT) para la puesta a punto y recuperación de todos estos equipos a nivel nacional.
- En la actualidad distintos entes como CORPOSALUD, PDVSA y CORPOELEC le solicitan al centro docente cardiológico del Estado Aragua la lista de requerimientos necesarios que se necesitan para activar estos equipos dentro de un plan de colaboración mutua entre instituciones de distintos sectores.
REFERENCIAS BIBLIOGRÁFICAS
Fecha de búsqueda del documento o enlace: 15/08/2020
Fecha de búsqueda del documento o enlace: 15/08/2020
Fecha de búsqueda del documento o enlace: 15/08/2020
Fecha de búsqueda del documento o enlace: 15/08/2020
- Material fotográfico adquirido en el Centro Docente Cardiológico del Estado Aragua desde el inicio de la actividad o servicio en Mayo del 2019
Fecha de búsqueda del documento: 15/08/2020
Contactos: tomasenriqueramosmesa@gmail.com
![]()






